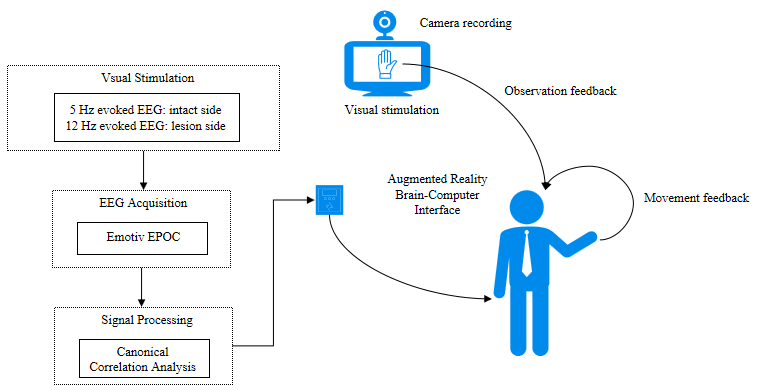
在机器人技术与神经科学交叉领域的最新突破中,微云全息宣布成功开发了一种创新的机械臂控制系统。该系统结合了增强现实(AR)、计算机视觉和稳态视觉诱发电位(SSVEP)-脑机接口(BCI),为用户提供了一个直观且高度集成的操作体验。这项技术的开发标志着向实用化脑控机器人迈出了重要的一步。微云全息的研究团队通过将最新的AR技术和脑机接口技术相融合,设计了一个集成的ARC-BCI控制系统(Augmented Reality Brain-Computer Interface),允许用户通过脑电图(EEG)信号控制机械臂。
该系统的核心是利用HoloLens提供的AR环境,它不仅呈现了机械臂的操作界面,还通过闪烁刺激激发用户的SSVEP,从而减少了用户在视觉刺激器和机械臂之间切换注意力的需要:
AR环境的定制与优化
环境定制:为特定应用场景定制AR环境,以确保用户界面的直观性和交互的自然性。
用户适应性:通过机器学习算法,自动调整AR显示以适应不同用户的视角和操作习惯。
SSVEP-BCI的信号处理与特征提取
信号预处理:采用滤波和去噪技术,提高EEG信号的质量。
特征选择:利用统计和机器学习方法,识别和提取与SSVEP相关的关键特征。
BCI与AR的同步机制
时间戳同步:确保BCI信号采集与AR环境刺激的精确同步。
反馈循环:建立一个反馈系统,将机械臂的状态信息反馈到AR界面,供用户调整下一步操作。
计算机视觉与物体识别
深度学习模型:训练深度学习模型以提高物体识别的准确性和鲁棒性。
实时物体追踪:开发算法实时追踪选定物体的位置和姿态变化。
机械臂的自动控制算法
运动规划:实现一个高效的运动规划算法,以快速响应用户的BCI命令。
力觉反馈:集成力觉传感器,提供反馈信号,增强操作的安全性和精确性。
系统集成测试与验证
模块测试:对AR、BCI、计算机视觉和机械臂控制各个模块进行独立测试。
系统验证:通过模拟实际操作场景,验证整个系统的性能和可靠性。
用户交互界面(UI)设计
交互设计:设计简洁直观的UI,减少用户的学习成本。
可访问性:确保系统界面对不同能力和背景的用户都是友好的。
数据记录与分析
日志记录:记录操作过程中的关键数据,用于后续分析和系统优化。
性能监控:实时监控系统性能,快速定位并解决潜在问题。
安全性能增强
故障检测:实现系统级的故障检测机制,确保在出现问题时能够及时响应。
权限管理:设置严格的用户权限管理,防止未授权的操作。
微云全息的ARC-BCI系统能够提供一个高度集成、用户友好、安全可靠的脑控机械臂操作平台,推动脑机接口技术在多个领域的应用。微云全息的这项技术不仅提升了脑控机器人的实用性,还为未来的人机交互界面设计提供了新的方向。随着技术的不断进步和优化,该系统有望在医疗、制造、服务业等多个领域发挥重要作用。
免责声明:以上内容为本网站转自其它媒体,相关信息仅为传递更多信息之目的,不代表本网观点,亦不代表本网站赞同其观点或证实其内容的真实性。如稿件版权单位或个人不想在本网发布,可与本网联系,本网视情况可立即将其撤除。


